
ILUMINACIÓN DIGITAL DEL TALGO CAMAS
Autor del Articulo: Francisco German Trinidad
Hola amigos:
El presente presente trabajo, es otra obra más del ingenio de nuestro amigo Germán, quien gentilmente nos lo explica para que os animéis y disfrutéis haciendo la iluminación de vuestro talgo camas.
Os dejo con el maestro.
Nota: El presente documento expone el trabajo desarrollado por mi parte y probado en mi composición; a mí me ha funcionado como se indica en él. No asumo ninguna otra responsabilidad.
OBJETIVO
Se trata de iluminar individualmente por departamentos, composiciones Talgo camas, funcionando el conjunto como un único decodificador.
La composición, indeformable, consta de dos furgones extremos, un coche cafetería y otro restaurante y coches de cuatro o cinco departamentos. La rama Barcelona-Talgo está formada por dieciséis remolques en total.
El funcionamiento se pretende que sea programable, manual o automático. Las distintas prestaciones se organizarán en un conjunto de variables de configuración.
Como en otros casos las direcciones empleadas pueden ser cortas o largas y todas las funciones son maleables en cualquier posición de F0 a F28.
PLANTEAMIENTO Y PROYECTO
Para conseguir el control individual de cada departamento en cada coche, es necesario instalar un circuito con microcontrolador en cada uno de ellos. Un ATtiny85 viene a consumir unos 5 mA y la conexión más apropiada de los LEDs en charlieplexing podría consumir otros 5 mA. Esos supondría un consumo del orden de 170 a 250 mA en toda la composición.
Hay que obtener 5 V desde la señal DCC en la vía. Suponiendo un valor, después de rectificada, de hasta 18 V, con un consumo de toda la composición de 200 mA, la disipación de potencia en un regulador serie estándar podría rondar los:
P = V · I = (18 – 5) · 0’2 = 2’6 W
Este valor hace inviable el empleo de un regulador del tipo 7805 porque la potencia a disipar provocaría un calentamiento peligroso del mismo. La solución: un regulador conmutado basado en un circuito integrado como el MC34063 o similar, un cargador de móvil para coche (de tamaño muy pequeño y precio muy asequible) o bien un circuito integrado que ya incorpora esas prestaciones: el R-78E-0.5 admite una tensión de entrada de 7 a 28 V y suministra hasta 500 mA sin calentarse en absoluto, con un precio razonable. Esta última ha sido la solución adoptada.

Por otra parte, la circuitería ha de ser mínima para que pase desapercibida en los coches del Talgo; por tanto, convendrá alimentar con 5V para evitar rectificadores y reguladores.
Otra cuestión es la conexión entre los coches, que no debe emplear mucho cableado para no interferir en el correcto funcionamiento de una composición que tiene un comportamiento inmejorable en la vía.
Con estas premisas y tras los ensayos previos necesarios se optó por emplear solamente dos hilos para alimentar a toda la composición: uno de ellos será la masa general del sistema y el otro la alimentación, generada en el furgón llamado maestro, en la que se incluyen unos microcortes con la información codificada para todos los esclavos.
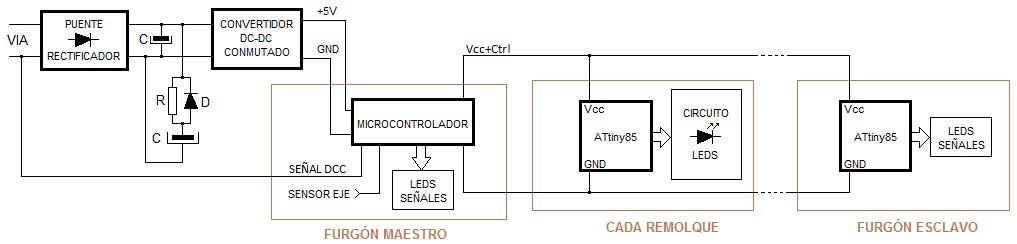
En el furgón maestro estará el decodificador que explorará la señal DCC para decodificarla y generará la alimentación de los esclavos, a 5V, con la información para su funcionamiento, además de controlar sus luces de señales.
Los esclavos en los remolques leerán la señal de control por un terminal (directamente porque esa señal oscilará entre 0 y 5 V) y alimentarán los LEDs de iluminación que se conectarán en formato charlieplexing el cual simplifica las conexiones al emplear menos cables que si se alimentaran individualmente y reduce el consumo al alimentar en cada momento a un solo LED.
Para ello se emplearán los otros cuatro terminales disponibles de un ATtiny85, microcontrolador de ocho patillas que se podrá ubicar fácilmente en cada coche ya que apenas necesita más componentes. Así se pueden controlar hasta doce LEDs.
En el caso del Talgo III desarrollado, los coches son de cuatro o cinco departamentos, pero en previsión de que se pueda aplicar a otros sistemas similares, el software gestiona ocho LEDs para los departamentos y los otros cuatro para la iluminación de las plataformas y pasillo.
En cada coche de departamentos, cafetería, restaurante y furgón, habrá un microcontrolador esclavo que recibirá a través de la alimentación las órdenes del maestro para controlar sus LEDs.
El funcionamiento podrá ser manual (activando los circuitos mediante funciones mapeables) o automático, en cuyo caso sólo la función principal (por defecto F0) se emplea para activar el funcionamiento. En cualquier caso, otra función (por defecto F1) indicará la posición del furgón maestro respecto a la locomotora, para poder invertir las señales sin necesidad de reprogramar en caso de, por ejemplo, llegar a una estación término y acoplar la locomotora en el extremo opuesto para invertir el sentido de marcha.
El funcionamiento automático se establece en una variable de configuración y con la dirección de la locomotora que se asigne (si la dirección no se cambia del valor 0, el funcionamiento se mantiene manual).
Las direcciones del decodificador y la locomotora pueden ser cortas o largas y se manejan en formato decimal para mayor comodidad: de 01 a 99 (corta) o de 0100 a 9999 (larga).
También son programables las intensidades luminosas en 16 pasos: de 0 (mínimo) a 15 (máximo).
SEÑAL DE CONTROL
Con los condicionantes expuestos, la alimentación a los esclavos se realiza a 5V con microcortes codificados que constituirán comandos.
Se emplean microcortes de tres tipos: pulso de sincronismo (inicio de comando), unos y ceros. Se hicieron pruebas con pulsos muy cortos y muy largos y el funcionamiento fue correcto en todos los casos. Los valores con que se ha desarrollado el proyecto son:
- 36 µs para los bits uno
- 72 µs para los bits cero
- 108 µs para los pulsos de sincronismo
Van en proporción 1, 2 y 3 para simplificar unos cálculos iniciales que hacen la lectura de estos valores bastante estable aunque varíe la frecuencia de reloj del microcontrolador.
Estos pulsos se agrupan en comandos. Cada uno está formado por:
- Pulso de sincronismo
- Tres bits que identifican el tipo de comando (0 a 4)
- Ocho bits de información (comando propiamente dicho)
- Un bit de paridad como chequeo de error
Y los tipos de comandos:
- 000 el básico, que se repetirá con mayor frecuencia. Sus bits significan:
- Estado de las luces rojas superiores……………….. 1 bit
- Estado de la luz roja inferior…………………………….. 1 bit
- Estado de la luz blanca de cola……………………….. 1 bit
- Estado de las luces del coche cafetería…………… 1 bit
- Estado de las luces del coche restaurante………. 1 bit
- Estado de las luces de los coches de viajeros: .. 3 bit
- 0 ð todas apagadas
- 1 ð pasillo y plataforma encendida
- 2 ð encendido total (fluorescente)
- 3 ð encendido aleatorio
- 4 ð apagado aleatorio
- 5 ð encendido/apagado aleatorio
- 001 pwm luces rojas superiores (nibble alto) y pwm luz roja inferior (nibble bajo)
- 010 pwm luz blanca de cola (nibble alto) y pwm luces coches de pasajeros (nibble bajo)
- 011 pwm de las luces de cafetería (nibble alto) y restaurante (nibble bajo)
- 100 duración mínima de pausa entre dos estados aleatorios, en décimas de segundo (de 0x00 a 0x7f)
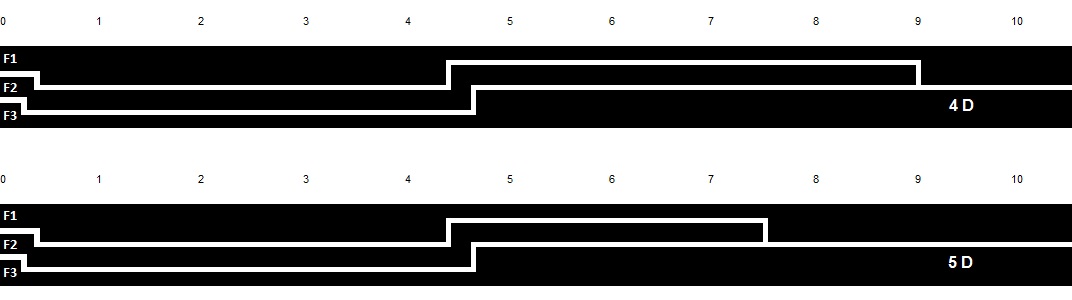
Por ejemplo, el comando de la figura significará:
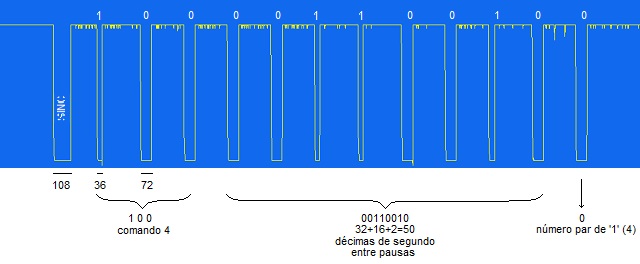
Comando 4: 50 décimas de segundo (5 sg) pausa mínima entre cambios aleatorios.
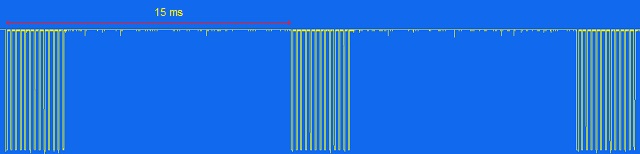
Los bits del comando se generan cada 256 µs aproximadamente, y los comandos se generan separados unos 15 ms:
En el inicio el maestro genera los comandos 4, 3, 2 y 1 para que los valores programados en ellos (que pueden ser nuevos para los esclavos) puedan ser actualizados individualmente por cada uno de ellos en su EEPROM, y a continuación siete veces el comando cero. Esta sucesión se repite indefinidamente durante todo el tiempo de funcionamiento. De esta manera, si algún esclavo perdiera la conexión, al reconectarse tendría información de los parámetros necesarios para su funcionamiento correcto.
La fiabilidad del sistema es grande porque el pulso de sincronismo es único y marca el inicio de recepción del comando, cualquiera que sea el estado de los esclavos. En las pruebas realizadas no se ha detectado ningún error.
CIRCUITOS
Fuente de alimentación
Inicialmente se planteó la alimentación de forma general mediante un puente rectificador, filtro y el integrado mencionado R-78E-0.5, pero se observó al osciloscopio que aparecían picos importantes en los puntos de conmutación de la señal DCC, y aunque parecían no influir en el funcionamiento del sistema, se optó por modificar el circuito y separarlo del decodificador propiamente dicho, facilitando al mismo tiempo la instalación en el furgón maestro:
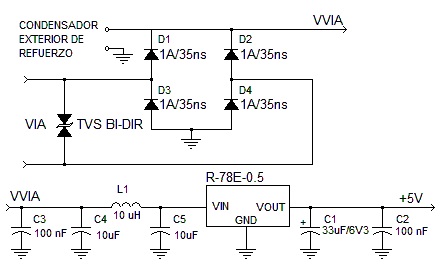
En primer lugar, un diodo TVS (Transient-Voltage-Suppression) bidireccional en la entrada recorta los valores elevados de los posibles picos generados en las transiciones de la señal cuadrada DCC; el puente rectificador (D1 a D4) se realiza con diodos rápidos, y en la entrada del convertidor DC-DC conmutado se construye el filtro en π propuesto por el fabricante, consistente en los dos condensadores multicapa de 10 µF, C4 y C5, con la inductancia L1 de 10 µH. El resto de condensadores son los habituales.
Con este circuito los picos observados quedan muy reducidos.
Como refuerzo pueden instalarse condensadores electrolíticos de elevada capacidad para ayudar a evitar los parpadeos. Se instalarán con el circuito habitual para evitar los consumos excesivos al inicio:
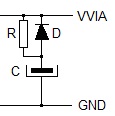
Donde R = 220 Ω, D = 1N5819 (de tipo Schottky para minimizar la caída de tensión en él cuando el condensador se descargue) y C de la mayor capacidad posible, para un mínimo de 25 V de tensión de trabajo. Estos valores no son críticos.
Distribución de componentes:
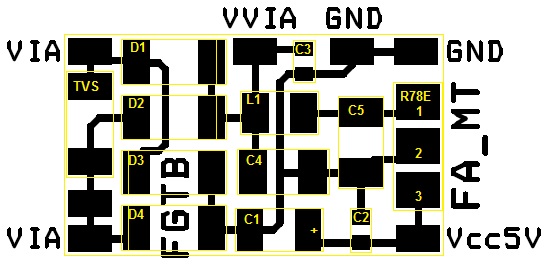
La placa pcb ocupa unos 23×13 mm (excluidos los textos) y puede ubicarse fácilmente el el furgón generador. Recibe la alimentación por los terminales marcados VIA y por Vcc5V y GND alimenta la placa del microcontrolador maestro. Entre los terminales VVIA y GND puede conectarse el condensador de refuerzo exterior.
Maestro
Recibe la alimentación de la fuente anterior, pero separada por el diodo Schottky D1, 1N5819, y estabilizada por el condensador electrolítico C3 de 33 µF. Así las conmutaciones realizadas con el MOSFET para alimentar a los esclavos no afectarán a su alimentación.
Por el Terminal PB0 se hace la exploración de la señal DCC de la vía para decodificarla. R2 protege esa entrada de la elevada tensión de la vía y forma además un filtro con C2 que reduce la influencia de posibles ruidos debidos a las conmutaciones y demás dispositivos en las vías.
Con el Terminal PB2 se controla la alimentación a los esclavos, pilotando un transistor MOSFET de canal P, que conecta los +5V que entrega la fuente a la alimentación Vctrl de los esclavos. De esta manera sus conmutaciones no afectan a la alimentación del microcontrolador. Esta tensión Vctrl y GND son los dos únicos hilos que recorren toda la composición. Hay que prestar especial atención a no invertir la polaridad.
La resistencia de 4K7 colocada a la salida tiene por objeto asegurar la conexión de Vctrl a GND durante los microcortes, aunque como se verá se refuerza con otras resistencias conectadas en la entrada de los esclavos.
Esta prevista la entrada por PA0 desde un sensor en el eje para conocer el sentido físico del desplazamiento, aunque esta opción no se desarrolló en este proyecto.
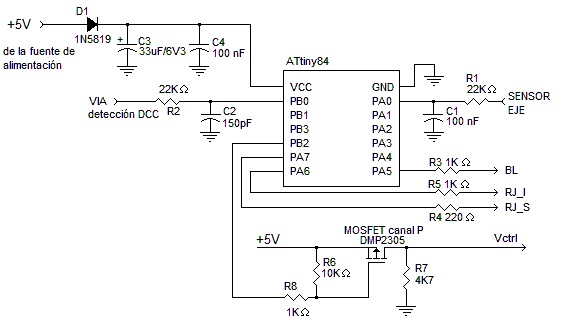
PA5, PA6 y PA7 controlan el encendido de las señales instaladas en este furgón. Las luces rojas superiores están formadas por dos diodos conectados en serie; por eso su resistencia es más baja que en las otras dos salidas. En cualquier caso, la intensidad luminosa es programable y podrá adaptarse al gusto de cada usuario.
Distribución de componentes:
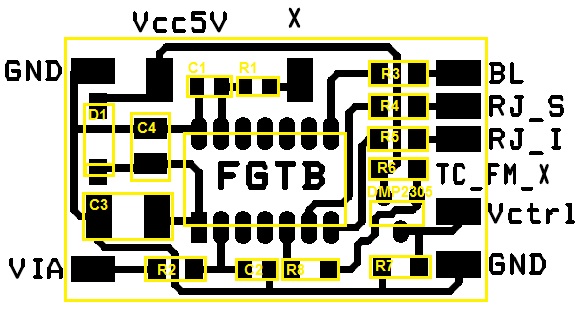
Esta placa mide unos 25×15 mm. Recibe las entradas Vcc5V, GND y VIA desde la placa anterior y tiene como salidas la alimentación codificada para los esclavos Vctrl y para los LEDs de señales: luces rojas superiores RJ_S, roja inferior RJ_I y blanca BL.
Esclavos
Coches de pasajeros
La alimentación el microcontrolador se separa y estabiliza por medio del diodo Schottky D1, 1N5819 y los condensadores C1 de 33 µF y C2 100 nF. Este sencillo sistema evita que los cortes interfieran en su tensión de alimentación. Observada al osciloscopio, no se aprecian variaciones en el Terminal Vcc durante los microcortes.
PB3 muestrea directamente la tensión Vctrl y de ella se extrae la información suministrada por el maestro. La resistencia R5 de 15KΩ de la entrada es necesaria para que el tiempo de bajada de los pulsos (cortes) sea aceptable. Durante los ensayos se apreció que este tiempo de bajada crecía al conectar más esclavos (sin duda debido a la capacidad interna del Terminal de lectura PB3), y con esta resistencia permanece en unos 4 µs, valor totalmente aceptable.
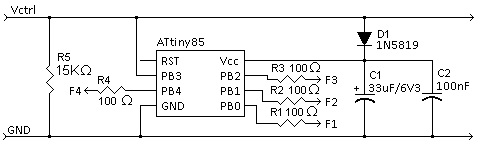
Y ya no hay más que las cuatro resistencias conectadas a las salidas de las filas de control del encendido de los LEDs por el sistema charlieplexing. Están calculadas para que el valor instantáneo de la corriente por cada uno de los doce posibles LEDs sea del orden de
(Vctrl – Vled) / (100+100) = (4’8-3) / 200 = 0’009 = 9 mA
suponiendo que la caída en el diodo Schottky es unos 0’2V. Este valor es más que suficiente para una iluminación realista; no obstante la intensidad luminosa también es programable en toda la composición.
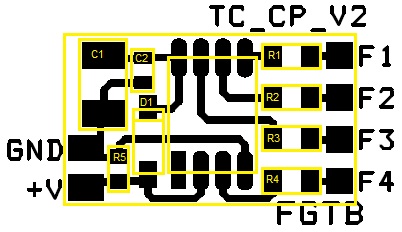
Sólo mide 17×10 mm y puede acomodarse fácilmente con los LEDs de iluminación como se mostrará en la instalación.
Cafetería y restaurante disponen de este mismo circuito.
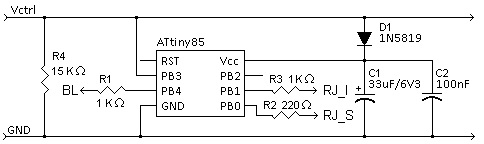
Furgón esclavo
Es similar anterior, pero las salidas alimentan solamente a los LEDs de señales.
Distribución de componentes:
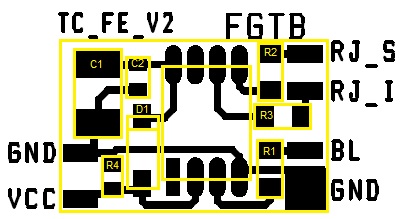
Mide 16×10 mm. Todos los esclavos tienen las conexiones de entrada de la alimentación en la misma disposición, de modo que el par de hilos que recorre toda la composición no tenga complicaciones en su trazado y colocación.
PROGRAMACIÓN
Maestro
Una interrupción por cambio de nivel en el Terminal PB0 se ocupa de la detección de paquetes DCC correctos, que luego se decodificarán en la función principal main(). Mide el tiempo transcurrido entre el flanco de subida y el de bajada de la tensión en ese terminal para discriminar si se trata de un cero o un uno y va acomodándolo en la trama. Si algo no es conforme a la normativa DCC pasa a esperar la sucesión de unos de un nuevo preámbulo.
Otra interrupción, esta vez por tiempo, se encarga de generar los comandos para los esclavos. No los genera inmediatamente porque necesitan un tiempo para realizar su reset interno (64 ms en la configuración habitual) y ese período “largo” se gestiona con el prescaler del timer0.
Estos comandos están almacenados en un array.
Los comandos 1 a 4 se obtienen al inicio del main() de las variables de configuración grabadas en la EEPROM del maestro y son los primeros que se generan. Los esclavos compararán estos valores con los grabados en sus EEPROM y si son distintos, los actualizarán; de esta manera las programaciones afectan al maestro, pero también las graban los esclavos en el arranque normal.
Como ya se indicó los bits se generan cada 256 µs aproximadamente y los comandos cada 15 ms. El primer comando cero tiene todos sus bits a cero y sirve para que los esclavos tengan información del tiempo correspondiente al bit cero, además de iniciar con todo desconectado.
En la función main(), en el bucle principal, se decodifican los paquetes recibidos cuando la interrupción encargada informa de que hay alguno correcto.
Si el paquete no afecta al decodificador, se ignora, y si se trata de un comando de programación de alguna variable de configuración (cv) la graba en su posición. Es importante destacar que no se realiza ninguna verificación del valor grabado; por lo tanto es responsabilidad del usuario el grabar valores dentro del rango correspondiente a cada cv. De no hacerlo así, el comportamiento del programa es imprevisible.
Se compara la dirección, corta o larga, con la del decodificador y en caso de coincidir se toman los parámetros que le afectan: velocidad (en 28 ó 128 pasos), sentido o funciones.
Y en una segunda parte se actúa sobre los comandos, en función de estos parámetros, y se almacenan en un array de donde los leerá la interrupción encargada de enviarlos a los esclavos.
Coches de pasajeros
El Terminal PB3, conectado a la línea de alimentación (Vctrl) genera interrupciones por cambio de nivel para realizar la medida del tiempo que duran los pulsos bajos (cortes) en ella: se toma referencia del valor del timer0 en el flanco de bajada, y en el de subida. La diferencia entre ellos es la duración del pulso.
Cuando el pulso es el de sincronismo, se inicializan las variables que permiten recibir los once pulsos que configuran el comando y el de paridad. Y los sucesivos pulsos se van cargando en un buffer hasta completar el comando y su verificación con el bit de paridad. Este bit de paridad consiste en un bit cero, si el comando contiene un número par de unos o ninguno, o un bit uno, si el número de unos es impar.
Cualquier diferencia con esta estructura se ignora. Cuando la recepción es correcta, el comando recibido se almacena en un array cuyo índice son los tres primeros bits recibidos, y cuyo contenido es el comando (los ocho bits restantes), como se ha expuesto en apartado “señal de control”.
Esta interrupción también altera el contenido de una variable que se emplea como valor aleatorio para los distintos efectos.
El otro timer, timer1, se utiliza para el refresco de los LEDs por el método de charlieplexing: actualiza el estado de cada uno de los doce (agrupados como ocho de departamentos y cuatro de pasillo) durante unos 1500 µs; es decir, con una frecuencia de unos 54 Hz para no percibir el parpadeo.
Cuando la intensidad luminosa no está programada al valor máximo, su alimentación se interrumpe antes.
En el programa principal, tras la configuración del sistema, lo primero que se espera recibir son los comandos 4, 3, 2, 1 y 0 que son los primeros generados por el maestro, como se explicó. En este primer comando cero ha ido almacenando el tiempo de duración de sus bits (tiempo medido con su reloj interno RC) que son ceros; si se diferencia en un valor mayor que diez, actualiza el nuevo valor en una variable interna almacenada en su EEPROM, como una cv. Tendrá así conocimiento de la medida que el maestro da a los ceros, y de ahí obtiene también los límites entre ceros y unos y entre ceros y pulso de sincronismo.
Y de manera análoga, si recibe un valor de intensidad luminosa o de pausa mínima distintos de los almacenados en su EEPROM, los actualiza.
A continuación, en el bucle principal va leyendo los comandos recibidos y actuando sobre los LEDs según indiquen. Los valores de configuración que se lean aquí no se actualizan en su EEPROM.
Cafetería y restaurante
El programa de estos coches es prácticamente el mismo que el de los coches de pasajeros; la única diferencia es que no existen los estados de encendido o apagado aleatorios. En cambio se les ha añadido un efecto de atenuación progresiva al mínimo de iluminación cuando en modo automático se entra en el estado de apagado aleatorio de los departamentos (desconozco si dejaban de prestar servicio durante las madrugadas; aquí sólo se busca un efecto de vistosidad).
Furgón esclavo
Este programa es el más sencillo y sigue la misma línea: lee los comandos iniciales (intensidades luminosas programadas para la luz blanca o las rojas) y actualiza su EEPROM si es necesario, y en el bucle principal enciende las señales que le ordene el comando cero. La intensidad luminosa se gestiona directamente con los modos pwm que permite el ATtiny85.
INSTALACIÓN
Es, sin duda, la parte más tediosa del proyecto. Se expone a continuación la que se ha realizado, condicionada por la instalación de una iluminación anterior. Aunque se han estudiado otras, se evitó aplicarlas por el riesgo de causar daños en el material.
Se instaló en el TALGO III RD “Barcelona TALGO”, la composición completa de 16 remolques. Para facilitar el trabajo se ha dividido en cuatro secciones conectadas entre sí de manera inseparable, llevando los hilos Vctrl y GND directamente:
 En la rama del furgón maestro se dotaron los ejes de tomas de corriente que se conectaron entre los coches con tiras de cobre autoadhesivo pegadas en la parte inferior del chasis, y con pines torneados como terminales:
En la rama del furgón maestro se dotaron los ejes de tomas de corriente que se conectaron entre los coches con tiras de cobre autoadhesivo pegadas en la parte inferior del chasis, y con pines torneados como terminales:

Las tomas de corriente son similares a las empleadas en otros Talgos:
 Las conexiones entre las ramas han mantenido el formato que ya había aplicado y que está inspirado en documentos publicados hace tiempo en Internet, de Joaquín Gómez Zalve (2004) y José Antonio Marcos Marín (Märkos, 2007), empleando pines torneados como hembrillas y los mismos pines o terminales de resistencias como machos. A pesar de los colores de los cables (antes eran tomas de la vía) en este extremo, el derecho corresponde a Vctrl y el izquierdo a GND:
Las conexiones entre las ramas han mantenido el formato que ya había aplicado y que está inspirado en documentos publicados hace tiempo en Internet, de Joaquín Gómez Zalve (2004) y José Antonio Marcos Marín (Märkos, 2007), empleando pines torneados como hembrillas y los mismos pines o terminales de resistencias como machos. A pesar de los colores de los cables (antes eran tomas de la vía) en este extremo, el derecho corresponde a Vctrl y el izquierdo a GND:

Furgón maestro
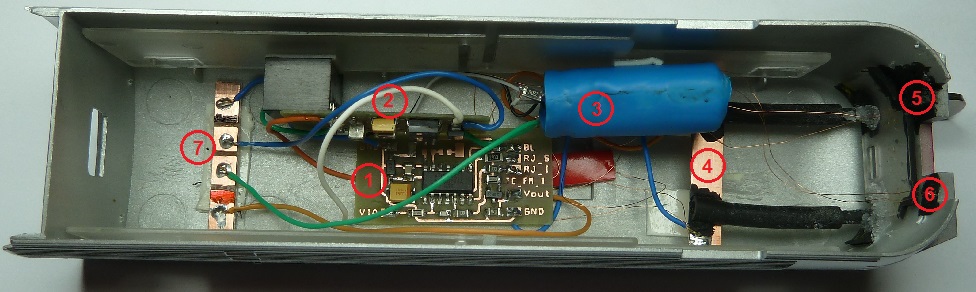
Contiene:
- Circuito principal.
- Fuente de alimentación.
- Condensador de refuerzo revestido de termoretráctil para evitar riesgo de cortocircuitos.

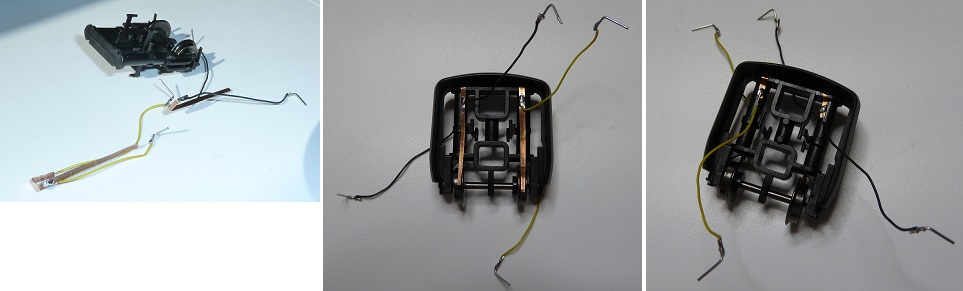
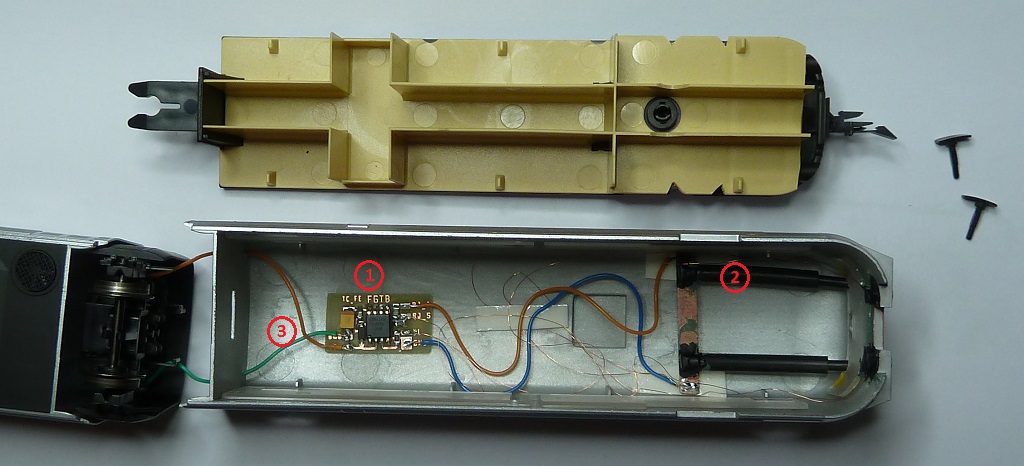
- Pletina donde van instalados dos LEDs rojos, con la luz guiada por fibra óptica de 1 mm hasta los pilotos superiores.
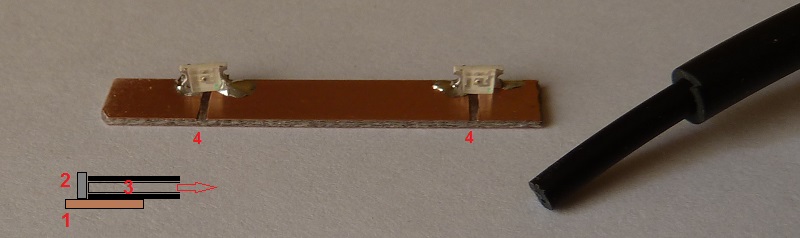
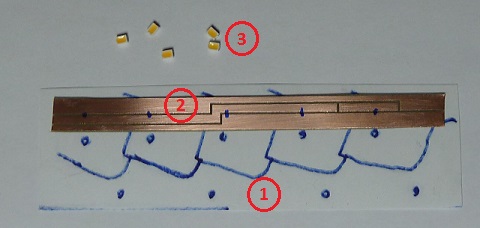
 Sobre la pletina (1) van soldados los LEDs (2) en posición vertical y frente a ellos pegada la fibra óptica (3) bien centrada, que transmite su luz hasta la posición de los pilotos, que previamente se han cortado de la pieza que los simula y se han pegado en su alojamiento. Los cortes en la pletina (4) se realizan para mantener la conexión en serie.
Sobre la pletina (1) van soldados los LEDs (2) en posición vertical y frente a ellos pegada la fibra óptica (3) bien centrada, que transmite su luz hasta la posición de los pilotos, que previamente se han cortado de la pieza que los simula y se han pegado en su alojamiento. Los cortes en la pletina (4) se realizan para mantener la conexión en serie.
Se puede observar la pintura negra abundante para evitar el desagradable efecto de que los pilotos de señales puedan reflejar su luz en el interior.
También se puede apreciar la abundancia de bicarbonato sódico, debido a las varias veces en que la fibra óptica se despegó.
5. Piloto blanco inferior formado por un LED 0402 pegado sobre su conducto de luz y separado para evitar el reflejo en la pieza.
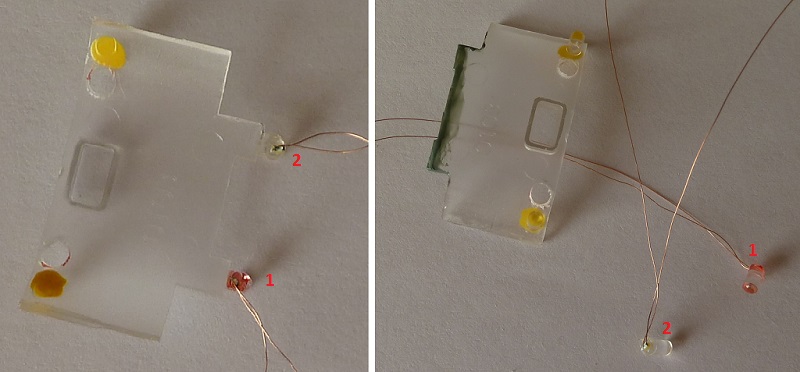
6. Piloto rojo inferior similar al anterior. En la foto anterior se muestra el pegado de estos LEDs y su separación de la pieza que forma el conjunto de pilotos y cristal de la puerta extrema, con la primera pintura para aislamiento luminoso
7. Pletina con las conexiones exteriores necesarias. En el extremo superior la de masa de toda la composición; en el inferior la Vctrl generada por el circuito maestro, y las dos interiores vendrán de las tomas de corriente de los raíles.
Furgón esclavo
Es más sencillo que el maestro:
- Placa de su circuito (como se trata del prototipo se puede observar que los puntos de conexión de las luces rojas están intercambiados; lo correcto corresponde a lo expuesto en el apartado de los circuitos).
- LEDs de señales, tratados en la misma forma que en el maestro. Lo mismo que en él, no se cortaron los largos hilos de que disponen los mínúsculos LEDs para no correr riesgos de rotura o error difícilmente subsanable en una instalación como esa, y se pegaron al techo del furgón con cinta adhesiva de doble cara.
- Conexión al bus general de alimentación.
Coches de pasajeros
En esta composición son de cuatro o cinco departamentos. El multiplexado por el método charlieplexing supone los LEDs conectados así (no están representadas las resistencias de 100 Ω de cada fila):
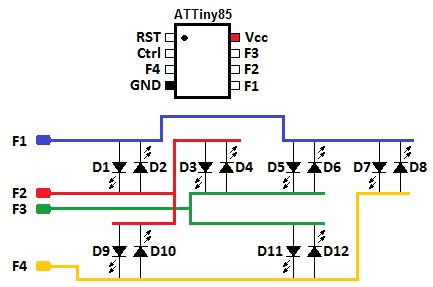
Por sencillez los diodos utilizados en los departamentos serán D1, D2, D3, D4 y D5, alimentados con las filas 1, 2 y 3. Se han diseñado las placas para facilitar su construcción. Distribución de las conexiones:
Placas a tamaño real (ancho 10’5 cm):
Pletinas pcb
O bien una válida para los dos tipos:
![]()
Pletina universal
Puede emplearse en las dos disposiciones conectando la isleta aislada a la fila 2 para cuatro departamentos, y a la fila 3 para cinco.
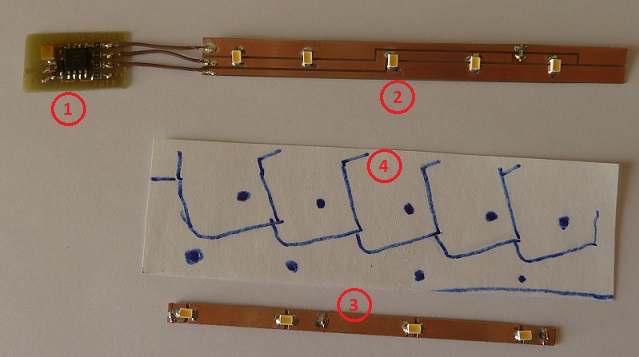
A continuación sobre un boceto simple de la distribución interior (1) se marcan las posiciones de cada punto de luz en la placa (2) donde se ubicarán los LEDs (3):
Se sueldan los LEDs y los terminales de las filas F1, F2 y F3 a la placa del circuito (1):

El circuito se pega en la cara opuesta donde se han colocado dos filas de cobre autoadhesivo que forman el bus de Vctrl y GND:

al cual se soldarán los hilos que van conectando a todos los coches.
El pasillo y plataforma están iluminados con los LEDs D9 a D12 que son alimentados por la fila 4 con las filas 2 y 3:

Estos puntos se han situado entre las ventanas del pasillo y en la plataforma de acceso, empleando el mismo boceto, sobre una pletina con la distribución mostrada en la figura anterior.
![]()
Pletina pasillos
Finalmente el conjunto ya está preparado para ser alojado en los coches:
El proceso de la instalación está mostrado en la foto siguiente:
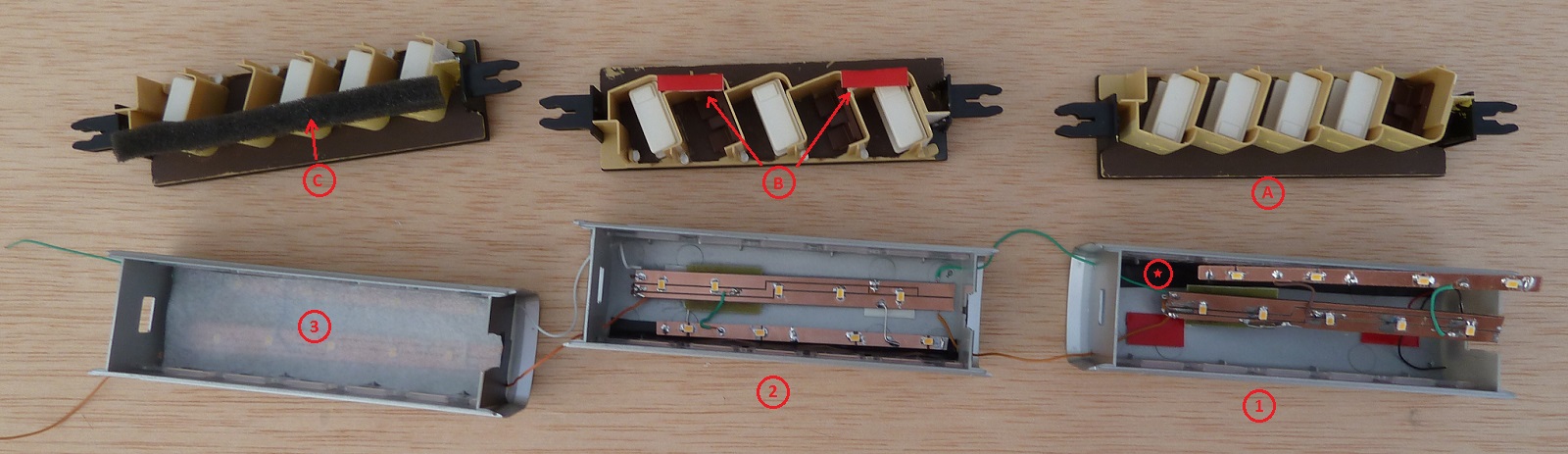
En los coches (1) y (2) se aprecian las conexiones entre la pletina de los departamentos y la del pasillo, a una distancia una de otra tomada del boceto y fácilmente ajustable; en el (1) preparado para la instalación, en el (2) adheridas al techo con cinta adhesiva de doble cara y en el (3) con un filtro (plástico de embalajes) para difuminar un poco la luz emitida por los LEDs.
También se puede apreciar la colocación de una tira de cinta aislante (*) para evitar la transparencia de las paredes.
En los interiores se presenta el (A) sin acondicionar, el (B) con dos puntos de cinta adhesiva de doble cara para colocar una espuma (C) que evita que la luz del pasillo ilumine los departamentos. Es evidente que el interior (B) no se corresponde con la distribución de iluminación; se ha puesto para mostrar el proceso que ha sido el mismo para los coches de cuatro departamentos que para los de cinco. Los suelos están pintados para evitar los reflejos irreales de la luz en ellos.
La cafetería y restaurante han sido tratados de la misma forma, omitiendo, lógicamente, las luces del pasillo. En la cafetería se han puesto LEDs de luz fría que simulan iluminación por tubos fluorescentes. Probablemente no será así en la realidad pero destaca en la composición.
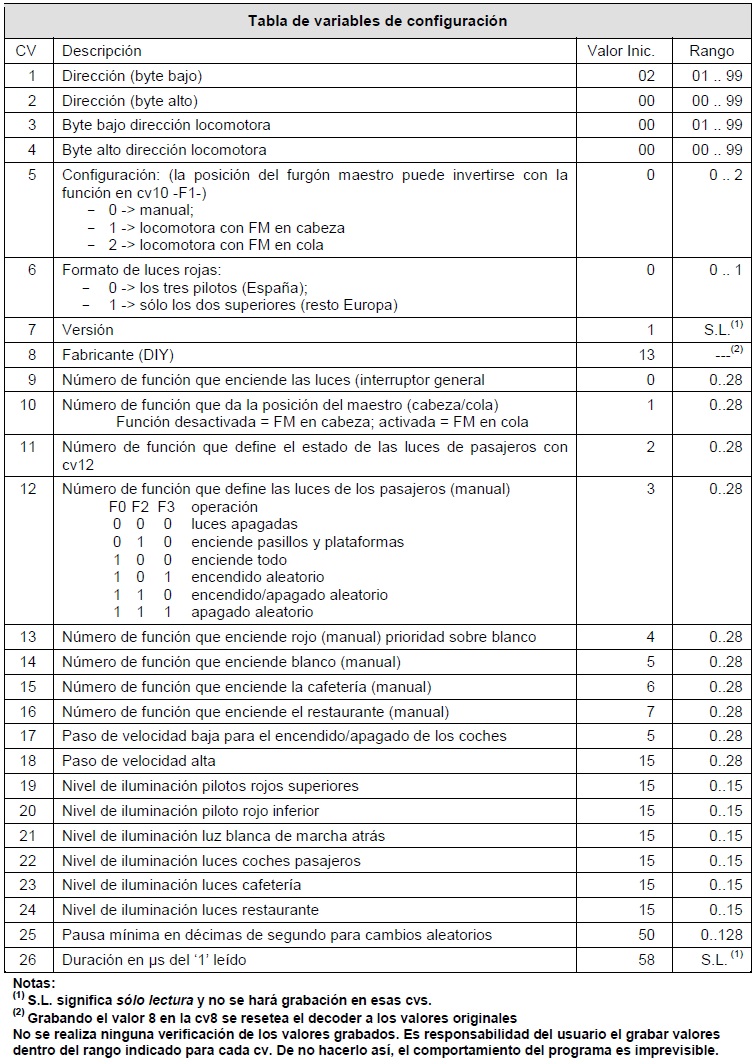
| Tabla de variables de configuración | |||
| CV | Descripción | Valor Inic. | Rango |
| 1 | Dirección (byte bajo) | 02 | 01 .. 99 |
| 2 | Dirección (byte alto) | 00 | 00 .. 99 |
| 3 | Byte bajo dirección locomotora | 00 | 01 .. 99 |
| 4 | Byte alto dirección locomotora | 00 | 00 .. 99 |
| 5 | Configuración: (la posición del furgón maestro puede invertirse con la función en cv10 -F1-)
– 0 -> manual; – 1 -> locomotora con FM en cabeza – 2 -> locomotora con FM en cola |
0 | 0 .. 2 |
| 6 | Formato de luces rojas:
– 0 -> los tres pilotos (España); – 1 -> sólo los dos superiores (resto Europa) |
0 | 0 .. 1 |
| 7 | Versión | 1 | S.L.(1) |
| 8 | Fabricante (DIY) | 13 | —(2) |
| 9 | Número de función que enciende las luces (interruptor general | 0 | 0..28 |
| 10 | Número de función que da la posición del maestro (cabeza/cola)
Función desactivada = FM en cabeza; activada = FM en cola |
1 | 0..28 |
| 11 | Número de función que define el estado de las luces de pasajeros con cv12 | 2 | 0..28 |
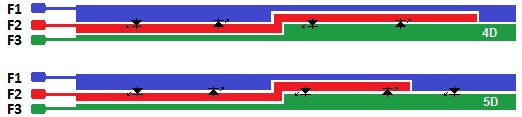
| 12 | Número de función que define las luces de los pasajeros (manual)
F0 F2 F3 operación 0 0 0 luces apagadas 0 1 0 enciende pasillos y plataformas 1 0 0 enciende todo 1 0 1 encendido aleatorio 1 1 0 encendido/apagado aleatorio 1 1 1 apagado aleatorio |
3 | 0..28 |
| 13 | Número de función que enciende rojo (manual) prioridad sobre blanco | 4 | 0..28 |
| 14 | Número de función que enciende blanco (manual) | 5 | 0..28 |
| 15 | Número de función que enciende la cafetería (manual) | 6 | 0..28 |
| 16 | Número de función que enciende el restaurante (manual) | 7 | 0..28 |
| 17 | Paso de velocidad baja para el encendido/apagado de los coches | 5 | 0..28 |
| 18 | Paso de velocidad alta | 15 | 0..28 |
| 19 | Nivel de iluminación pilotos rojos superiores | 15 | 0..15 |
| 20 | Nivel de iluminación piloto rojo inferior | 15 | 0..15 |
| 21 | Nivel de iluminación luz blanca de marcha atrás | 15 | 0..15 |
| 22 | Nivel de iluminación luces coches pasajeros | 15 | 0..15 |
| 23 | Nivel de iluminación luces cafetería | 15 | 0..15 |
| 24 | Nivel de iluminación luces restaurante | 15 | 0..15 |
| 25 | Pausa mínima en décimas de segundo para cambios aleatorios | 50 | 0..128 |
| 26 | Duración en µs del ‘1’ leído | 58 | S.L. (1) |
|
Notas: (1) S.L. significa sólo lectura y no se hará grabación en esas cvs. (2) Grabando el valor 8 en la cv8 se resetea el decoder a los valores originales No se realiza ninguna verificación de los valores grabados. Es responsabilidad del usuario el grabar valores dentro del rango indicado para cada cv. De no hacerlo así, el comportamiento del programa es imprevisible. |
|||
Gracias por dedicarme vuestro tiempo, y espero que os haya gustado. Saludos a todos y hasta la proxima.
German Trinidad
hola y como programas el ATtiny85
con que programa?
Como dice el Tutorial, no soy Yo el autor.
Yo no se como se hace, intenta contactar con el auttor Genman Trinidad.
Saludos y Gracias por Tu tiempo.
Manolosanz